 :13828821506
:13828821506
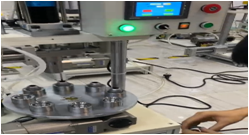
視覺檢測設備






視覺分揀自動化設備

廣泛用于各類工作無序狀態的上下料、分揀、拆碼垛、裝配等場景,具有精度高、速度快,布置快速,維護方便的特點。
通過3D視覺精準識別產品的尺寸大小、位置姿態,機器人路徑規劃技術,實現不同尺寸貨物自動碼垛,不再需要依據每個不同的品類去做機器人的編程工作,真正實現:看見即規劃。應用于工廠流水線包裝碼垛環節,針對來料的貨物尺寸動態未知下的應用。
詳細介紹:
多品類、不同尺寸的包裝通過輸送帶來料是碼垛流程的常見方式 ,而如何實現不需要對機器人編程就可以實現自動碼垛過程呢?
背景:許多電商或者醫藥行業拆垛時,經常會遇到有些垛已經不完整,且不同垛的包裝尺寸也不一樣。
難點:垛形不完整,上層有可能只有一兩箱包裹且不是規則擺放。包裝箱也有不同尺寸。
解決方案:通過悟空3D傳感器采集三維圖像信息,利用3D智能軟件可以兼容各種尺寸的包裝,也可以兼容不完全規則的垛形。通過優化計算引導工業機械人進行拆垛。
專業針對散亂無序堆放的工件設計,可協助機器人實現3D智能抓取。通過對工件3D數據掃描以實現三維準確定位,引導機械手準確抓取定位工件,實現了工業機器人自動化生產線的柔性工裝。
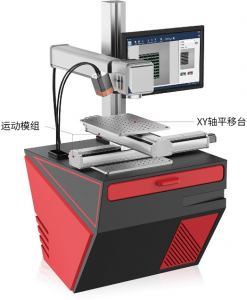
技術原理:
通過高速、精確的3D結構光成像系統,對物體表面輪廓進行掃描,形成點云數據;并對點云數據進行智能分析處理,加以AI算法、機器人路徑自動規劃、自動防碰撞等智能化技術;計算出當前工件實時空間坐標,并引導機器人完成自動抓取任務。協助機器人集成商快速完成3D定位方案。
解決方案:
通過機器人3D定位系統,引導機器人抓取曲軸并根據三維特征定點放置
通過3D視覺方案實現三維掃描定位
快速建立、更換數據模型(建模)滿足小批量多品種的生產需求
智能分析工件抓取優先級,引導工業機器人快速精準抓取工件,有效解決上下層工件相互干擾的問題
客戶收益:
系統結構簡單、經濟實用,有效降低生產成本和維護成本。
產線柔性高,不僅可以滿足現有不同型號產品的生產,同時支持用戶快速添加新的型號。
產品質量提升的同時將工人們從繁復的勞動中解放出來。
某快遞公司的分揀中心,在進行包裹分揀時,快遞員將收到的各種類的包裹(紙箱、郵件、軟包)統一散亂堆放到分揀處,然后由人工逐個拾取放置到分揀輸送帶上。這種人工分揀方式效率低下,滿足不了快遞行業日益發展的快速要求。
技術分析:
方案要求實現無人化分揀流程
料框堆疊不同形狀的袋裝包裝和盒包裝無法用傳統二維識別
包裝形狀各異,尺寸各異
人工揀選速度和質量受個人情緒等影響,極不穩定
人工 揀選多造成內部快件不確定損傷
解決方案:
通過機器人3D定位系統,引導機器人從包裹箱抓取包裹放置到傳送帶
通過3D視覺方案實現三維掃描定位
選用定制兼容型通用視野的產品型號
設用機器人設定抓取后掃描位置再放置到輸送帶
設定機器人輕拿輕放機制,確保揀選過程零損傷
必須是數字
不能為空
E-mail格式不對
手機號格式不對
不能為空
不能為空

- 上一篇:視覺定位打標
- 下一篇:在線式飛行激光打標機